How can humans or machines interact with an environment and learn a strategy for selecting actions that are beneficial to their goals? Answers to this question fall under the artificial intelligence category of reinforcement learning. Here I am going to provide an introduction to temporal difference (TD) learning, which is the algorithm at the heart of reinforcement learning.
I will be presenting TD learning from a computational neuroscience background. My post has been heavily influenced by Dayan and Abbott Ch 9, but I have added some additional points. The ultimate reference for reinforcement learning is the book by Sutton and Barto, and their chapter 6 dives into TD learning.
Conditioning
To start, let’s review conditioning. The most famous example of conditional is Pavlov’s dogs. The dogs naturally learned to salivate upon the delivery of food, but Pavlov realized that he could condition dogs to associate the ringing of a bell with the delivery of food. Eventually, the ringing of the bell on its own was enough to cause dogs to salivate.
The specific example of Pavlov’s dogs is an example of classical conditioning. In classical conditioning, no action needs to be taken. However, animals can also learn to associate actions with rewards and this is called operant conditioning.
Before I introduce some specific conditioning paradigms, here are the important definitions:
= stimulus
= reward
= no reward
= value, or expected reward (generally a function of
= binary, indicator variable, of stimulus (1 if stimulus present, 0 otherwise)
Here are the conditioning paradigms I want to discuss:
- Pavlovian
- Extinction
- Blocking
- Inhibitory
- Secondary
For each of these paradigms, I will introduce the necessary training stages and the final result. The statement, 



Pavlovian
Training: 
Results: ![s \rightarrow v[r]](https://s0.wp.com/latex.php?latex=s+%5Crightarrow+v%5Br%5D&bg=ffffff&fg=444444&s=0&c=20201002)
Extinction
Training 1:
Training 2: 
Results: ![s \rightarrow v[x]](https://s0.wp.com/latex.php?latex=s+%5Crightarrow+v%5Bx%5D&bg=ffffff&fg=444444&s=0&c=20201002)
Blocking
Training 1: 
Training 2: 
Results: ![s_1 \rightarrow v[r]](https://s0.wp.com/latex.php?latex=s_1+%5Crightarrow+v%5Br%5D&bg=ffffff&fg=444444&s=0&c=20201002)
![s_2 \rightarrow v[x]](https://s0.wp.com/latex.php?latex=s_2+%5Crightarrow+v%5Bx%5D&bg=ffffff&fg=444444&s=0&c=20201002)
Inhibitory
Training: 
Results: ![s_2 \rightarrow -v[r]](https://s0.wp.com/latex.php?latex=s_2+%5Crightarrow+-v%5Br%5D&bg=ffffff&fg=444444&s=0&c=20201002)
Secondary
Training 1:
Training 2: 
Results: ![s_2 \rightarrow v[r]](https://s0.wp.com/latex.php?latex=s_2+%5Crightarrow+v%5Br%5D&bg=ffffff&fg=444444&s=0&c=20201002)
Rescorla-Wagner Rule
How do we turn the various conditioning paradigms into a mathematical framework of learning? The Rescorla Wagner rule (RW) is a very simple model that can explain many, but not all, of the above paradigms.
The RW rule is a linear prediction model that requires these three equations:



and introduces the following new terms:
= weights associated with stimuli state
= learning rate, with

What do each of these equations actually mean?
- The expected reward,
- But there may be a mismatch, or error, between the true actual reward,
- Therefore we should update our weights of each stimuli. We do this by adding a term that is proportional to a learning rate
, and the stimuli
During a Pavlovian pairing of stimuli with reward, the RW rule predicts an exponential approach of the weight to 

The RW rule will also continue to work when the reward/stimulus pairing is stochastic instead of deterministic and the will will still approach the final value of
How does blocking fit into this framework? Well the RW rule says that after the first stage of training, the weights are 


One thing that the RW rule incorrectly predicts is secondary conditioning. In this case, during the learning of the first stimulus, 



One final note. The RW rule can provide an even better match to biology by assuming a non-linear relationship between
Temporal Difference Learning
To properly model secondary conditioning, we need to explicitly add in time to our equations. For ease, one can assume that time, 


The straightforward (but wrong) extension of the RW rule to time is:
![v[t]=w[t-1] \cdot u[t]](https://s0.wp.com/latex.php?latex=v%5Bt%5D%3Dw%5Bt-1%5D+%5Ccdot+u%5Bt%5D&bg=ffffff&fg=444444&s=0&c=20201002)
![\delta[t] = r[t]-v[t]](https://s0.wp.com/latex.php?latex=%5Cdelta%5Bt%5D+%3D+r%5Bt%5D-v%5Bt%5D&bg=ffffff&fg=444444&s=0&c=20201002)
![w[t] = w[t-1]+\epsilon \delta[t] u[t]](https://s0.wp.com/latex.php?latex=w%5Bt%5D+%3D%C2%A0w%5Bt-1%5D%2B%5Cepsilon+%5Cdelta%5Bt%5D+u%5Bt%5D&bg=ffffff&fg=444444&s=0&c=20201002)
where we will say that it takes one time unit to update the weights.
Why is this naive RW with time wrong? Well, psychology and biology experiments show that animals expected rewards does NOT reflect the past history of rewards nor just reflect the next time step, but instead reflects the expected rewards during the WHOLE REMAINDER of the trial. Therefore a better match to biology is:
![R[t]= \langle \sum_{\tau=0}^{T-t} r[t+\tau] \rangle](https://s0.wp.com/latex.php?latex=R%5Bt%5D%3D+%5Clangle+%5Csum_%7B%5Ctau%3D0%7D%5E%7BT-t%7D+r%5Bt%2B%5Ctau%5D+%5Crangle&bg=ffffff&fg=444444&s=0&c=20201002)
![\delta[t] = R[t]-v[t]](https://s0.wp.com/latex.php?latex=%5Cdelta%5Bt%5D+%3D+R%5Bt%5D-v%5Bt%5D&bg=ffffff&fg=444444&s=0&c=20201002)
where ![R[t]](https://s0.wp.com/latex.php?latex=R%5Bt%5D&bg=ffffff&fg=444444&s=0&c=20201002)
![r[t]](https://s0.wp.com/latex.php?latex=r%5Bt%5D&bg=ffffff&fg=444444&s=0&c=20201002)
![R[t]= \langle \sum_{\tau=0}^{T-t} \gamma^\tau r[t+\tau] \rangle](https://s0.wp.com/latex.php?latex=R%5Bt%5D%3D+%5Clangle+%5Csum_%7B%5Ctau%3D0%7D%5E%7BT-t%7D+%5Cgamma%5E%5Ctau+r%5Bt%2B%5Ctau%5D+%5Crangle&bg=ffffff&fg=444444&s=0&c=20201002)
where 
We have managed to write down a set of equations that accurately summarize biological reinforcement. But how can we actually learn with this system? As currently written, we would need to know the average reward over the remainder of the whole trial. Temporal difference learning makes the following assumptions in order to solve for the expected future rewards:
- Future rewards are Markovian
- Current observed estimate of reward is close enough to the typical trial
A Markov process is memoryless in that the next future step only depends on the current state of the system and has no other history dependence. By assuming rewards follow this structure, we can make the following approximation:
![R[t]= \langle r[t+1] \rangle + \gamma \langle \sum_{\tau=1}^{T-t} \gamma^{\tau-1} r[t+\tau]](https://s0.wp.com/latex.php?latex=R%5Bt%5D%3D+%5Clangle+r%5Bt%2B1%5D+%5Crangle+%2B+%5Cgamma+%5Clangle+%5Csum_%7B%5Ctau%3D1%7D%5E%7BT-t%7D+%5Cgamma%5E%7B%5Ctau-1%7D+r%5Bt%2B%5Ctau%5D&bg=ffffff&fg=444444&s=0&c=20201002)
![R[t]= \langle r[t+1] \rangle + \gamma R[t+1]](https://s0.wp.com/latex.php?latex=R%5Bt%5D%3D+%5Clangle+r%5Bt%2B1%5D+%5Crangle+%2B+%5Cgamma+R%5Bt%2B1%5D&bg=ffffff&fg=444444&s=0&c=20201002)
The second approximation is called bootstrapping. We will use the currently observed values rather than the full estimate for future rewards. So finally we end up at the temporal difference learning equations:
![R[t] = r[t+1] + \gamma v[t+1]](https://s0.wp.com/latex.php?latex=R%5Bt%5D+%3D+%C2%A0r%5Bt%2B1%5D+%2B+%5Cgamma+v%5Bt%2B1%5D&bg=ffffff&fg=444444&s=0&c=20201002)
![\delta[t] =r[t+1] + \gamma v[t+1]-v[t]](https://s0.wp.com/latex.php?latex=%5Cdelta%5Bt%5D+%3Dr%5Bt%2B1%5D+%2B+%5Cgamma+v%5Bt%2B1%5D-v%5Bt%5D&bg=ffffff&fg=444444&s=0&c=20201002)
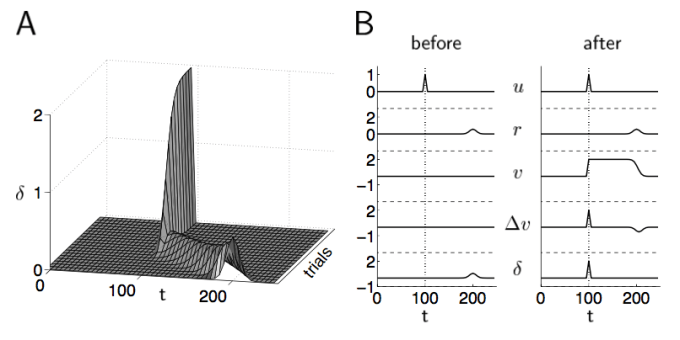
Dayan and Abbott, Figure 9.2. This illustrates TD learning in action.
I have included an image from Dayan and Abbott about how TD learning evolves over consecutive trials, please read their Chapter 9 for full details.
Finally, I should mention that in practice, people often use the TD-Lambda algorithm. This version introduces a new parameter, lambda, which controls how far back in time one can make adjustments. Lambda 0 implies one time step only, while lambda 1 implies all past time steps. This allows TD learning to excel even if the full system is not Markovian.
Dopamine and Biology’s TD system
So does biology actually implement TD learning? Animals definitely utilize reinforcement learning and there is strong evidence that temporal difference learning plays an essential role. The leading contender for the reward signal is dopamine. This is a widely used neurotransmitter that evolved in early animals and remains widely conserved. There are a relatively small number of dopamine neurons (in the basal ganglia and VTA in humans) that project widely throughout the brain. These dopamine neurons can produce an intense sensation of pleasure (and in fact the “high” of drugs often comes about either through stimulating dopamine production or preventing its reuptake).
There are two great computational neuroscience papers that highlight the important connection between TD learning and dopamine that analyze two different biological systems:
Both of these papers deserved to be read in detail, but I’ll give a brief summary of the bee foraging paper here. Experiments were done that tracked bees in an controlled environment consisting of “yellow flowers” and “blue flowers” (which were basically just different colored cups). These flowers had the same amount of nectar on average, but were either consistent or highly variable. The bees quickly learned to only target the consistent flowers. These experimental results were very well modeled by assuming the bee was performing TD learning with a relatively small discount factor (driving it to value recent rewards).
TD Learning and Games
Playing games is the perfect test bed for TD learning. A game has a final objective (win), but throughout play it can be difficult to determine your probability of winning. TD learning provides a systematic framework to associate the value of a given game state with the eventual probability of learning. Below I highlight the games that have most significantly showcased the usefulness of reinforcement learning.
Backgammon
Backgammon is a two person game of perfect information (neither player has hidden knowledge) with an element of chance (rolling dice to determine one’s possible moves). Gerald Tesauro’s TD-Gammon was the first program to showcase the value of TD learning, so I will go through it in more detail.
Before getting into specifics, I need to point out that there are actually two (often competing) branches in artificial intelligence:
Symbolic logic tends to be a set of formal rules that a system needs to follow. These rules need to be designed by humans. The connectionist approach uses artificial neural networks and other approaches like TD learning that attempt to mimic biological neural networks. The idea is that humans set up the overall architecture and model of the neural network, but the specific connections between “neurons” is determined by the learning algorithm as it is fed real data examples.
Tesauro actually created two versions of a backgammon program. The first was called Neurogammon. It was trained using supervised learning where it was given expert games as well as games Tesauro played against himself and told to learn to mimic the human moves. Neurogammon was able to play at an intermediate human level.
Tesauro’s next version of a backgammon program was TD-Gammon since it used the TD learning rule. Instead of trying to mimic the human moves, TD-Gammon used to the TD learning rule to assign a score to each move throughout a game. The additional innovation is that the TD-Gammon program was trained by playing games against itself. This initial version of TD-Gammon soon matched Neurogammon (ie intermediate human level). TD-Gammon was able to beat experts by both using a supervised phase on expert games as well as a reinforcement phase.
Despite being able to beat experts, TD-Gammon still had a weakness in the endgame. Since it only looked two-moves ahead, it could miss key moves that would have been found by a more thorough analytical approach. This is where symbolic logic excels and hence TD-Gammon was a great demonstration of the complimentary strength and weaknesses of symbolic vs connectionist logic.
Go
Go is a two person game of perfect information with no element of chance. Despite this perfect knowledge, the game is complex enough that there are around 

Recently AlphaGo made a huge splash by beating one of the world’s top players of Go. Most Go players, and even many artificial intelligence researchers, thoughts an expert level Go program was years away. So the win was just as surprising as when DeepBlue beat Kasparov in chess. AlphaGo is a large program with many different parts, but at the heart of it is a reinforcement learning module that utilizes TD learning (see here or here for details).
Poker
The final frontier in gaming is poker, specifically multi-person No-Limit Texas Hold’em. The reason this is the toughest game left is that it is a multi-player game with imperfect information and an element of chance.
Last winter the computer systems won against professionals for the first time in a series of heads up matches (computer vs only one human). Further improvements are needed to actually beat the best professionals at a multi-person table, but these results seem encouraging for future successes. The interesting thing to me is that both AI system seems to have used only a limited amount of reinforcement learning. I think that fully embracing reinforcement and TD learning should be the top priority for these research teams and might provide the necessary leap in ability. And they should hurry since others might beat them to it!
